Feature-Based Locomotion Controllers
People
Abstract
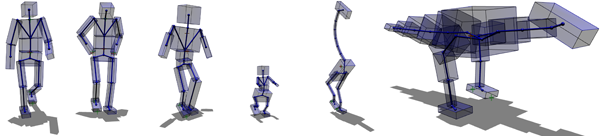
This paper introduces an approach to control of physics-based characters based on high-level features of movement, such as center-of-mass, angular momentum, and end-effectors. Objective terms are used to control each feature, and are combined by a prioritization algorithm. We show how locomotion can be expressed in terms of a small number of features that control balance and end-effectors. This approach is used to build controllers for human balancing, standing jump, and walking. These controllers provide numerous benefits: human-like qualities such as arm-swing, heel-off, and hip-shoulder counter-rotation emerge automatically during walking; controllers are robust to changes in body parameters; control parameters and goals may be modified at run-time; control parameters apply to intuitive properties such as center-of-mass height; and controllers may be mapped onto entirely new bipeds with different topology and mass distribution, without modifications to the controller itself. No motion capture or off-line optimization process is used.
Paper
Martin de Lasa, Igor Mordatch, Aaron Hertzmann, Feature-Based Locomotion Controllers, ACM Transactions on Graphics, 2010, 29, 3, (Proc. SIGGRAPH). BibTex | ErrataSlides
SIGGRAPH 2010 Presentation Slides | Keynote (190 MB) | PDF (12 MB)Video
Related Projects
- Robust Physics-Based Locomotion Using Low-Dimensional Planning
- Prioritized Optimization for Task-Space Control